Introduction
A powerful AI can easily outperform humans at almost any task. People must weigh the trade-offs necessary to develop new technology in this context. Effectively using powerful AI will surely enhance human skills and achievements. Nonetheless, AI may be used for other purposes, such as privacy violations or data breaches, with disastrous effects (Jin, 2018). While advancements in artificial intelligence will surely simplify people’s lives to a certain extent, the negative repercussions must also be resolved. These may include employment losses due to automation, changes to social norms, and, finally, societal instability. Some scholars have coined the phrase ‘artificial sociality,’ referring to humans’ growing dependence on mediated technology, such as social networks (Guzman and Lewis, 2019). Autonomous driving has been a source of contention in artificial intelligence for a long period.
Specifically, autonomous vehicles may help to avoid many accidents caused by human mistakes and are more fuel-efficient. However, the amount of ubiquity should be considered, and as a safety measure, society may seek to establish new legislation preventing or controlling human driver participation (Peng, 2020). Additionally, decreased safety issues will contribute to cost savings since the tax rate paid by customers may be modified. There will be less money spent on health care expenditures associated with automotive accidents and road construction.
The second consideration is the impact on the transportation services industry. As autonomous vehicles become more prevalent and people’s travel patterns change, the price of public transport will fall. Similarly, expectations for navigation performance and accuracy will attain an all-time high, threatening to destabilize the related technology business. This essay examines how self-driving cars are conceptualized and depicted theoretically and rhetorically and how these themes impact their acceptance and implementation in practice.
Sociological Theories and Autonomous Vehicles
In today’s world, AI is typically viewed with mixed feelings. Some are excited about these technological advancements, while others are skeptical, claiming that their usage might have devastating effects. For example, social robots may be amusing while assisting with domestic duties or serving as friends. Nevertheless, this advancement raises privacy and security issues, typically linked with portable, cloud-connected gadgets. Additionally, they are vulnerable to cyberattacks due to their reliance on malicious governments and entities abusing software and data (Anderson & Rainie, 2018). Meanwhile, others fear that AI would lead to job automation, causing numerous individuals, such as taxi drivers, to lose their jobs. Thus, sociological theories may be employed to identify the source of human ambivalence about self-driving automobiles.
The primary theories discussed are utilitarianism, virtue ethics, and Kantian ethics. To demonstrate the applicability of these ideas to the topic being discussed, the following example will be used:
On a two-lane highway, a self-driving automobile with one passenger is moving. Similarly, a double-decker bus carrying 30 people, including kids, is approaching the opposite lane. Three people are walking beside an observation path to the right of the autonomous vehicle. The bus swerves into the path of the autonomous vehicle abruptly. In this case, the moral problem becomes clear since the unmanned automobile must make a judgment in seconds. Concurrently, the issue of how the manufacturer configured the autonomous vehicle to perform comes into play. It is useful to understand who the moral actor is determining how autonomous cars should crash when trying to include classical ethical concepts into this predicament.
Kantian Ethics
Fundamentally, Kantian ethics includes several universally applicable basic ideals. On the foundation of these ideals, each individual is considered an end in and of themselves instead of a means to an end (Ulgen, 2017). According to the theory, it is always more ethical to preserve one’s principles than alleviate suffering. This method is built on the contrast between inflicting and allowing pain. Thus, the theory argues that for a Kantian believer, there is a moral difference between creating harm and allowing it to occur (Nyholm, 2018). When the concept is implemented in the present circumstance, it is evident how a Kantian would construct the autonomous vehicle. The unmanned automobile would be programmed not to engage, culminating in a crash with the bus, killing its rider and perhaps hurting bus passengers, including children. Ulgen (2017) argues that this is because allowing damage to arise is more morally permissible than taking any action that kills everyone in the situation.
Utilitarianism
What ethical principles imply for catastrophe programming choices is seldom apparent. Often, it is a controversial moral matter that remains disputable. Utilitarian ethics increase social happiness while decreasing community discontentment (Karnouskos, 2021). Thus, a self-driving car may be equipped with sophisticated technology that enables it to do utilitarian calculations on the expected effects of different choices faster and more precisely than a human driver (Karnouskos, 2021). Utilitarians may argue for providing autonomous automobiles with these qualities and designing them to fail only when expected usefulness is maximized.
Nevertheless, it is not clear that this is the position of a utilitarian. A utilitarian may be aware that some people may be scared of riding in utilitarian vehicles, preferring to ride in vehicles built to appreciate their inhabitants. An insightful utilitarian would consider this and argue for self-driving cars to be tailored to safeguard their passengers. The utilitarian may argue for this, reasoning that increasing the number of people who desire to utilize autonomous cars rather than regular autos will likely reduce overall traffic accidents and deaths. Utilitarian supporters might advocate for whichever approach maximizes general satisfaction.
It might indicate that users should be attracted to autonomous cars, guaranteeing that their vehicles would behave in “non-utilitarian” settings in the case of a collision. Further, this stresses the need to identify the virtuous individual who will make the decision (Nyholm, 2018). For instance, if the car is being optimized for value, the ideal strategy may be to advise them that it is being created in their desired fashion but failing in whichever manner optimizes utility. Similarly, a moral actor would be the regulatory agency or the automotive manufacturer that permits the operation of these specific autos.
The utilitarian developer’s main objective would have been to decrease deaths when incorporating utilitarianism into the preceding situation. This looks simple at first glance; the self-driving automobile should sacrifice its solitary occupant by swerving off the road to avoid hitting the 30 bus passengers and three pedestrians. However, the moral calculus of the autonomous automobile must take a variety of considerations into account. An example is a chance that present protections will effectively avert such a calamity. Perhaps the bus is safer than autonomous cars due to its rigorous safety measures. If this is the case, the detectors on the driverless automobile may properly infer that colliding with the bus would not lead to the demise of its passengers. To prevent casualties, the self-driving automobile will delicately crash with the bus.
Virtue Ethics
It is impossible to imagine any ethical guidelines for how self-driving cars should crash. The goal of virtue ethics is to acquire and then fully recognize a variety of necessary routines and perfections (Nyholm, 2018). When examining the norms of autonomous driving in general, virtue ethics may be useful. The degree to which people are careful when driving and how responsible they feel for their automobile is determined by the design of their vehicle. Regarding the case analysis, a programmer who adheres to virtue ethics may believe that creating the autonomous automobile to strike pedestrians to rescue bus passengers is unlawful. Since the pedestrians were strolling on the right flank of the road, it might be assumed that they were following the law. Crashing into them suggests punishing them for obeying traffic laws.
This revelation has ramifications for virtue ethics in many ways. Individuals who use risky technology, such as vehicles, are admired for their caution and acceptance of their actions. Therefore, from a virtue-ethical perspective, humans must endeavor to design and code autonomous vehicles in a way that encourages users to operate them with caution and professionalism. Thus, self-driving autos may be considered moral technology. In other words, they may evolve into technologies that contribute to the development of human qualities.
The concepts above vividly describe the present status of arguments about the complete implementation of self-driving automobiles. The emphasis was on the final decision in a crash scenario involving an autonomous vehicle. This circumstance thus creates another ethical concern. Who must be held liable when an autonomous vehicle causes injury or death to a person? Automobile manufacturers would be held liable for any technical failures that led to the disaster. Consequently, this will incentivize manufacturers of self-driving automobiles to invest significantly in developing high-quality vehicles, ensuring consumer safety and limiting criminal liability. Others may argue that autonomous automobiles should be held liable in the case of an accident, particularly if they have been trained to make judgments in such situations.
If autonomous vehicle manufacturers and users are not accountable for incidents resulting in injury or death, perhaps the vehicle itself should be. In reality, humans cannot give up machines because they lack a conscience. Therefore, it is appropriate to require users of autonomous vehicles to sign a user agreement. Then, in the case of an accident, either party could be held liable. However, most users of autonomous vehicles and manufacturers will guarantee that the automobiles are insured in the real usage situation. With high-priced insurance coverage, users of driverless vehicles will transfer the cost of collision-related losses to their insurers. Manufacturers would likewise take the same course of action.
Ambivalence toward Self-Driving Cars
Ambivalence toward self-driving cars may be linked to two factors: (i) a lack of information about artificial intelligence and robotics and (ii) an ingrained prejudice towards the benefits or dangers of self-driving autos. For many, this attitude is unclear, crossing the line between negative and positive. The media and news coverage of the development and implementation of self-driving autos is rife with ambiguity. These portrayals of autonomous vehicles have a huge impact on potential consumers’ judgments about whether or not to purchase one. A classic example of ambivalence attitude is shown in figure 1 one below.
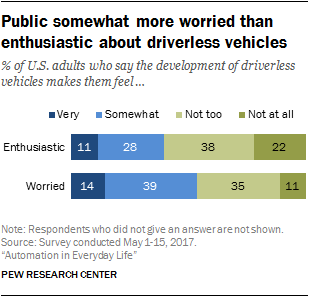
The figure above shows attitude of American adults towards self-driving cars.
Consequently, the safety benefits of driverless vehicles are vital for certain individuals. The promise of autonomous vehicles to save lives and avoid accidents is based on the reality that more than 94 percent of fatal collisions are caused by human error (National Highway Traffic Safety Administration, 2021). Figure 2 shows a breakdown of some of the causes of vehicular accidents. Autonomous vehicles can eliminate such events, therefore safeguarding their passengers and other commuters (Kaur & Rampersad, 2018). Moreover, self-driving vehicles may provide even additional Americans with new mobility options. According to the NHTSA, in 2021, at least 100 million Americans will be disabled. In the majority of the United States, employment and independent living are reliant on driving. Autonomous vehicles might bring this level of freedom to many more individuals. In short, driverless automated cars will make it simpler for the disabled and elderly to travel between locations.
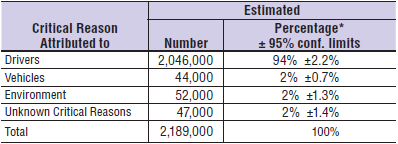
The table shows some of the reasons for crashes in the U.S., comprising related to driver, vehicle, and the environment.
Self-driving vehicles will solve the parking issues that afflict conventional vehicles. Typically, many households have several automobiles that are utilized simultaneously. Vehicle ownership will decline as self-driving vehicles become more prevalent. A self-driving vehicle is not required to remain stationary at all times. Saving gasoline, a driverless automobile can transport a person to and from work, as well as transport other family and friends to their destinations. In addition, almost all autonomous vehicles will be electric and carbon-neutral (Kim, 2018). This will minimize carbon emissions since fewer gasoline-powered cars will be on the road. Another benefit of self-driving cars is that individuals engage in other activities simultaneously, which cannot be done in typical vehicles, such as reading, making phone calls, and more (see figure 3 below).

Conversely, self-driving automobiles will result in significant job losses in the taxi market. This will force commercial and taxi drivers to look for alternative employment opportunities. Due to autonomous vehicles, the transportation sector will lose jobs. Individuals in the field will be pushed to seek jobs in other sectors with little assurance of success. However, this does not rule out the possibility that autonomous automobiles would create employment. With the rising demand for unmanned vehicles and the gradual entry of new manufacturers into the market, numerous employment opportunities will emerge.
Additionally, autonomous vehicles face the possibility of cyberterrorism. Technically, any computer program with Internet access is susceptible to hacking. It is intimidating to program complicated software that is bug-free and immune to external threats. Sometimes, weaknesses in programming can be exploited by hackers to compromise computer systems. Hackers may target loopholes in increasingly sophisticated systems, such as autonomous autos, which depend on sensors, real-time data, and cameras. For instance, autonomous vehicle cameras or sensors may be tricked into entering inappropriate crossings of motorways leading to severe incidents.
Conclusion
Since this transformation is unavoidable, people will adopt self-driving vehicles on a larger scale in the long term. As with every technology, the advantages and disadvantages of autonomous autos have been effectively outlined via language that appeals to consumers’ intellect, emotions, and morality. The unknown is how these compelling strategies influence the public’s perception of driverless cars. Nonetheless, as addressed in this article and through the perspective of several ethical concepts, the viability of AI and self-driving vehicles will need strong legislative support based on rigorous regulatory frameworks.
References
Anderson, J., & Rainie, L. (2018). Artificial intelligence and the future of humans. Pew Research Center. Web.
Guzman, A.L. and Lewis, S.C. (2019). Artificial intelligence and communication: A human–machine communication research agenda. New Media & Society, 22(1), pp.70–86. Web.
Jin, G. Z. (2018). Artificial intelligence and consumer privacy. The Economics of Artificial Intelligence: An Agenda; Agrawal, A., Gans, J., Goldfarb, A., Eds, 439-462. Web.
Jude, A. (2020). How to improve the self-driving car passenger experience. Ericsson.com. Web.
Karnouskos, S. (2021). The role of utilitarianism, self-safety, and technology in the acceptance of self-driving cars. Cognition, Technology & Work, 23(4), 659-667. Web.
Kaur, K., & Rampersad, G. (2018). Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. Journal of Engineering and Technology Management, 48, 87-96. Web.
Kim, T. J. (2018). Automated autonomous vehicles: Prospects and impacts on society. Journal of Transportation Technologies, 8(03), 137. Web.
National Highway Traffic Safety Administration (2021). Automated Vehicles for Safety. NHTSA. Web.
Nyholm, S. (2018). The ethics of crashes with self‐driving cars: A roadmap, I. Philosophy Compass, 13(7), e12507. Web.
Peng, Y. (2020). The ideological divide in public perceptions of self-driving cars. Public Understanding of Science, 29(4), 436-451. Web.
Smith, A., & Anderson, M. (2017). 3. Americans’ attitudes toward driverless vehicles. Pew Research Center: Internet, Science & Tech; Pew Research Center: Internet, Science & Tech. Web.
Ulgen, O. (2017). Kantian ethics in the age of artificial intelligence and robotics. QIL, 43, 59-83. Web.